
Navegación Reactiva de un Robot aplicando una estrategia bifásica en una Raspberry Pi 3
Barra lateral del artículo
Publicado:
Aug 17, 2020
Palabras clave:
Navegación Reactiva, Robot móvil, Estrategia bifásica
Contenido principal del artículo
Resumen
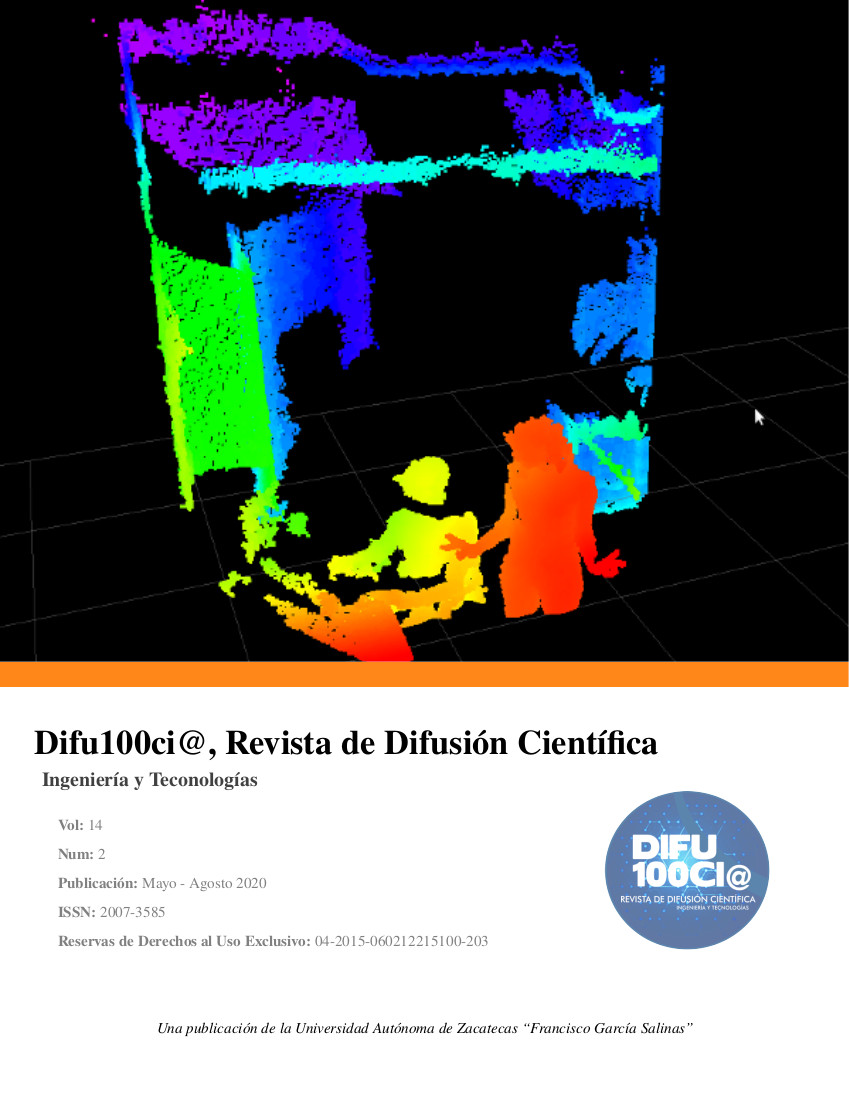
Este trabajo presenta una estrategia bifásica, para la navegación reactiva en tiempo real, de un robot móvil que se desplaza en un ambiente estructurado. En la primera fase, se hace la adquisición de datos a través de un sensor Kinect, para ser procesados por la tarjeta Raspberry Pi 3 y detectar los elementos encontrados en el campo de visión del sensor. La segunda fase trabaja con la información obtenida para tomar las decisiones necesarias y evitar la colisión con los elementos detectados en el entorno. Finalmente, se muestran los resultados de las pruebas experimentales en entornos diferentes.
Detalles del artículo
Cómo citar
Navarrete Sánchez, M. A., Vite Chávez, O., Olivera Reyna, R., Olivera Reyna, R., Mercado Pérez, S., Muñoz-Minjares, J. U., & Marín Hernández, A. (2020). Navegación Reactiva de un Robot aplicando una estrategia bifásica en una Raspberry Pi 3. Difu100ci@, Revista De difusión científica, ingeniería Y tecnologías, 14(2), 1-7. Recuperado a partir de http://difu100cia.uaz.edu.mx/index.php/difuciencia/article/view/6
Sección
Artículos